Die Geschichte des autonomen Fahrens
Viele denken, dass autonomes Fahren ein neues Thema ist, das es erst seit dem 21. Jahrhundert gibt. Dabei gab es die ersten Ideen und Umsetzungsversuche schon viel früher. Auf dieser Webseite werden wir euch die wichtigsten Ausschnitte dieser Geschichte zeigen
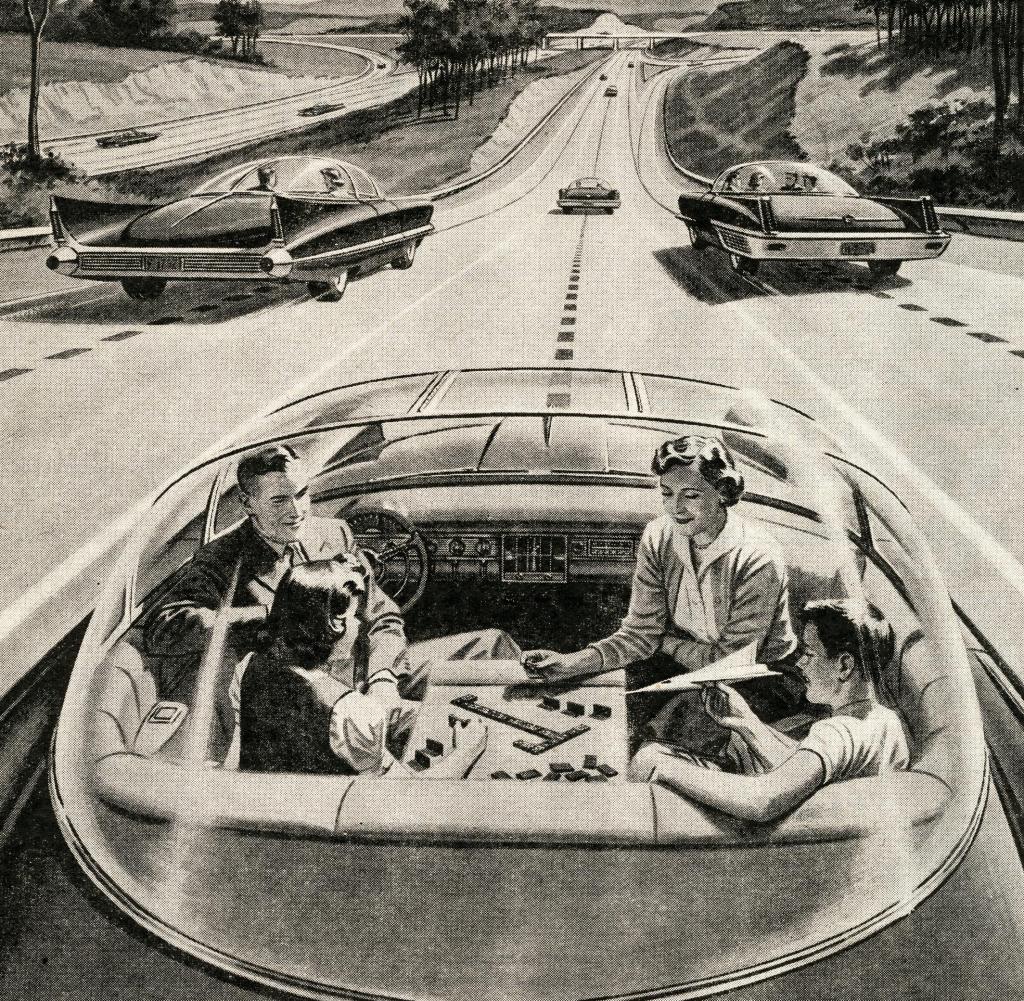
Im Jahr 1939 hat der Künstler Norman Bel Geddes auf der Weltausstellung sein 3300m² (ca. 57m x 57m) grosses Diorama von einer Miniaturstadt ausgestellt. Die Miniaturstadt taufte er Futurama und in ihr fuhren kleine Autos auf den Strassen fuhren. Gezogen wurden die Wagen von elektromagnetischen Feldern, die durch automatisierte Funksignale ausgelöst und von kleinen Drahtstiften erzeugt wurde, die in die Strassen eingelassen waren. Norman Bel Geddes wurde von General Motors beauftragt.
Eine ähnliche Technologie wie die der Miniaturstadt von Norman Bel Geddes verwendete die Forschungsabteilung der Radio Corporation of America 1953. Anfangs experimentierten sie an Modell Autos und zwei Jahre später testeten sie an einem Prototyp, indem sie einen Wagen über ein Teilstück einer Strasse fahren liessen. In das Teilstück waren Metalldetektoren und ein breites Kabel entlang einer Idealspur eingezogen worden. Das Problem bei dieser Methode war, dass es sehr kostenaufwendig gewesen wäre dies grossflächig auf den US-Highways auszubauen. Deshalb wurde es verworfen. Es gab weitere Versuche mit demselben Grundsatz, beispielsweise etwas unter dem Asphalt zu installieren, um damit die Autos zu leiten, doch sie scheiterten an dem gleichen Problem.
1989 wurde ein Militärrettungswagen umgebaut, der später unter dem Namen ALVINN bekannt wurde und vermutlich das erste Fahrzeug war, das von einer künstlichen Intelligenz gesteuert wurde. Die KI wurde durch Strassenbilder trainiert, dessen Schöpfer ein Bildgenerator war. Man kann davon ausgehen, dass die KI durch die damalige Hardware begrenzt war. Trotz dieses Sachverhaltes kann die dafür verantwortliche US-Universität dies als Erfolg ansehen, da der dicke Van mit bis zu 112 Kilometer pro Stunde auf den Strassen unterwegs sein konnte – und das sowohl auf befestigten Wegen wie auch im Gelände.
Ernst Dickmann war Ingenieur, Luft- und Raumfahrforscher. Er war davon überzeugt, dass der Fortschritt vor allem mit Autos ginge, die sich auch selbst kontrollieren können. Das Ergebnis davon war in den 90er unter anderem der VaMoRs (oder auch VaMP ) und dessen Zwillingsfahrzeug VITA-2. Das waren zwei von der Universität der Bundeswehr München und Mercedes-Benz umgerüstete Mercedes 500 SEL. In diesen wurde die Lenkung, Bremse und Beschleunigung von einem Computer übernommen, der dies mithilfe von vier Kameras tat und ansonsten keine weiteren Sensoren wie GPS oder Laser besass. 1994 und 1995 legte der VaMP auf öffentlichen Strassen 2500km ohne irgendwelche Probleme zurück und erreichte bis zu 175 km/h. Zudem fuhr er 90% der Strecke ohne Hilfe durch Menschenhand.
Bosch startete im 1990 Jahr den Versuch, ein Auto zu entwickeln, das Eigenständige eine Navigationstechnologie und Routenführung bereithält. Das Besondere an diesem war, dass es nicht mit Hilfe von GPS die Position des Wagens bestimmte, sondern dies mit Kompass, Tachometer und Radsensoren tat. Ausserdem erhielt der Mercedes-Benz-410-Van vom Bosch-Team mehrere Kameras und einen Bordcomputer. Er konnte Fahrbahnen, Kurven und sogar Verkehrsschilder erkennen und darauf reagieren, wodurch er mehrere Ausfahrten bewältigen konnte. Das Projekt wurde aus finanziellen Gründen nicht weitergeführt, da die verbaute Technologie damals alleine hunderttausend D-Mark gekostet hat.